
No products in the cart.
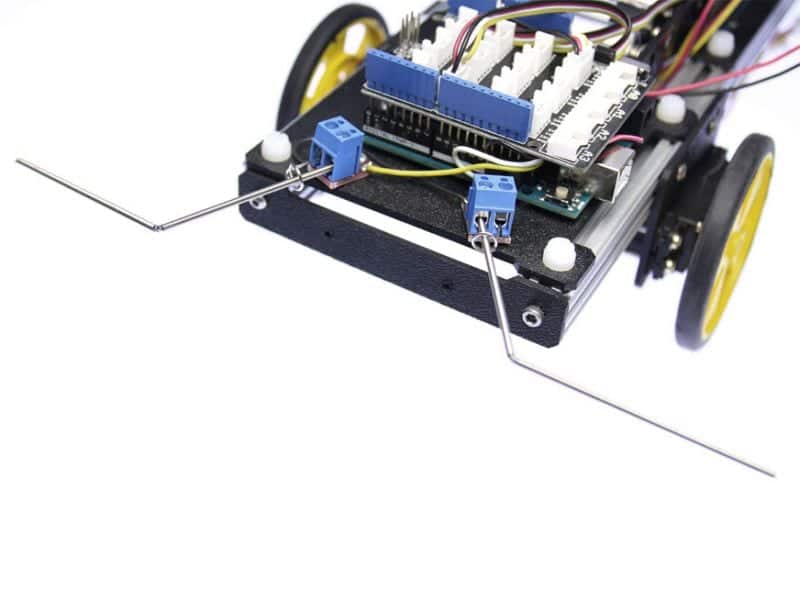

This clever “spring-in-loop” sensor configuration is a well-proven touch-sensor for small to medium size robot applications
$3.69 CAD
We’ve been using a variation of this sensor method for many, many years with great success, and have been asked more than once for a kit. So, here’s a quicky we put together.
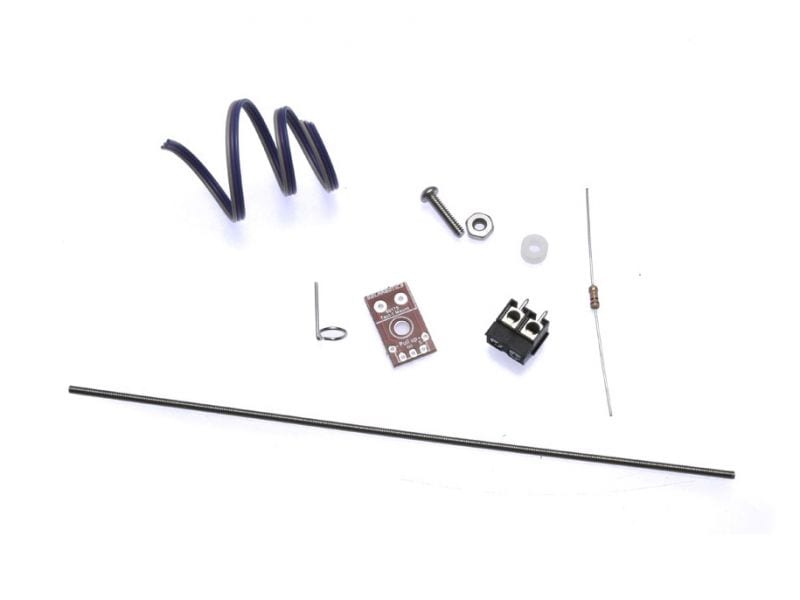
The Tact-1 tactile touch sensor uses a custom-manufactured nickel-plated spring as a deflection sensor. Bend it beyond a threshold, and it touches the ring surrounding it, creating a signal. You can apply force to the sensor from nearly any angle to get useful “I’ve bumped something!” feedback.
The originals were constructed using guitar or bass strings and paperclips, hand-soldered to spare circuit boards. This design features simple, easy-to-adjust construction.
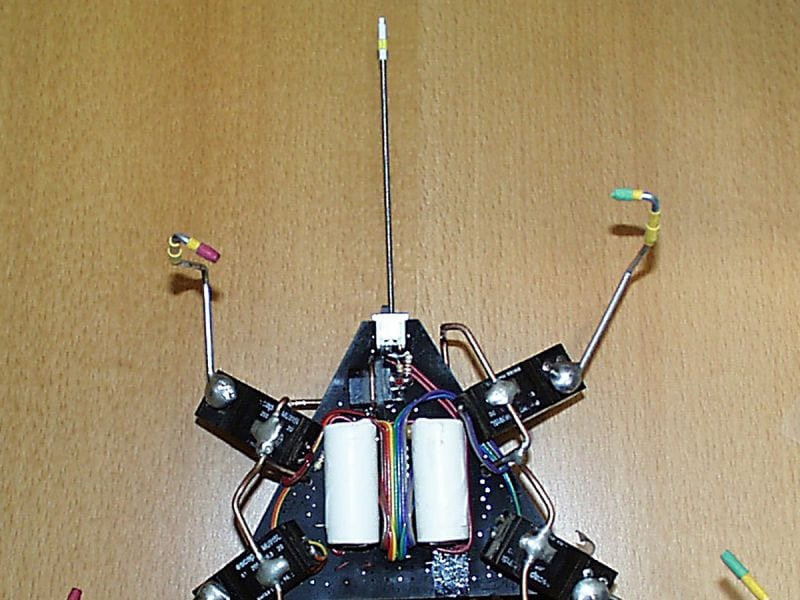
Variations of this sensor have been built by scaling the concept up or down. The largest used wire-cable guides from a car throttle mechanism, and the smallest used fine wire built in a vertical array. This small one was used in an interesting experiment to build a “Reactive Maze Solving Robot with Biologically-Inspired Wind Sensor”, built by Mark Tilden at the Telluride Biomorphic Workshop in 1999. It used wind currents hitting this sensor array to sum wind direction and direct a Khepera robot (affectionally refered to as the “Rastabot”).
Other variations of this sensor have been used for full-perimeter detection, by anchoring the free end of the sensor around to the far side of the robot, creating a full bumper rather than an antenna. It’s a very versatile sensor!
Features:
Specifications:
Note: This kit builds one sensor (not a pair)
| Weight | 0.0053 kg |
|---|---|
| Dimensions | 2 × 1.5 × 0.5 cm |
| Availability | Available Online |
Only logged in customers who have purchased this product may leave a review.

Reviews
There are no reviews yet.